
O termo corrida espacial não ficaria “redondo” sem a participação de veículos em expedições à Lua e Marte. Se a primeira vez em que o homem pisou no satélite natural foi em 1969, na missão americana Apollo 11, o primeiro veículo a rodar em solo lunar foi o soviético Lunokhod 1, em 1970. O detalhe é que o veículo não era tripulado, estando mais para um robô controlado remotamente. Muito semelhante a uma grande caixa d'água, o veículo tinha 2,3 metros de comprimento, 840kg de massa e oito rodas, cada uma com um pequeno motor elétrico.
Vários instrumentos científicos davam ares retrofuturistas ao robôzinho: antenas, uma espécie de broca para perfurar o solo, câmeras e a tampa, que, quando aberta, revelava painéis solares usados para recarregar as baterias. À noite o veículo hibernava, esperando pelo nascer do sol para voltar a funcionar. Para suportar temperaturas que podem chegar a 150 graus negativos, o robô tinha uma unidade de aquecimento que usava energia nuclear. O rover operou por 322 dias terrestres, tendo rodado 10,5km. Em 1973, a União Soviética enviou à Lua o Lunokhod 2, nos mesmos moldes de seu antecessor, porém um pouco mais avançado. Esse segundo robô operou por cerca de quatro meses, tendo percorrido 42km.
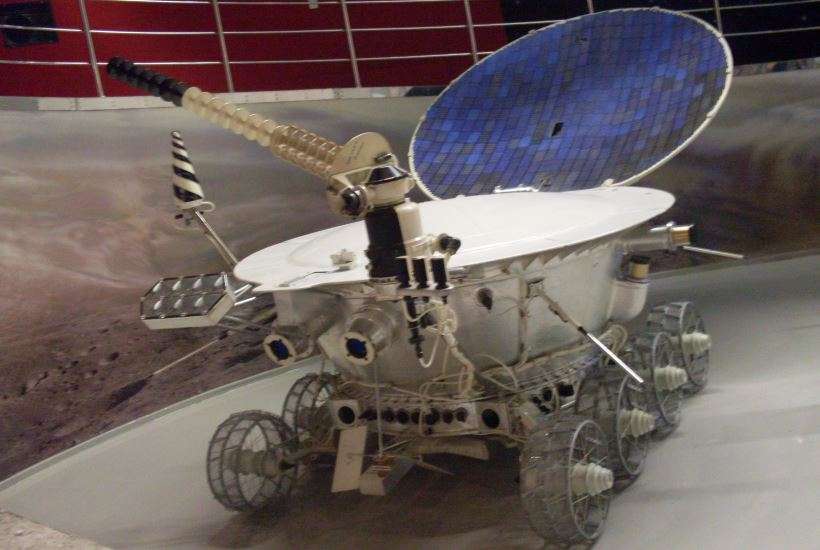
Um dado curioso é que esse veículo tem um dono na Terra, o empresário Richard Garriott, que arrematou o veículo em um leilão no ano de 1993, tendo pagado US$ 68.500. Até ontem ele não foi buscar o brinquedinho! Entre os dois Lunokhod, os soviéticos ainda fizeram uma investida em Marte por meio de duas espaçonaves (Mars 2 e Mars 3), compostas por um orbitador e um aterrizador. Tudo bem que se tratavam de landers estacionários (sem a mobilidade de um veículo) e tripulantes, mas valeu pela tentativa. Os aterrizadores não foram bem sucedidos. O Mars2 acabou caindo no “Planeta Vermelho” de forma descontrolada. Já o Mars 3 aterrizou conforme o planejado, mas logo perdeu sinal. Apesar disso, a missão não foi um fracasso, já que os orbitadores conseguiram enviar à Terra imagens e dados sobre Marte.
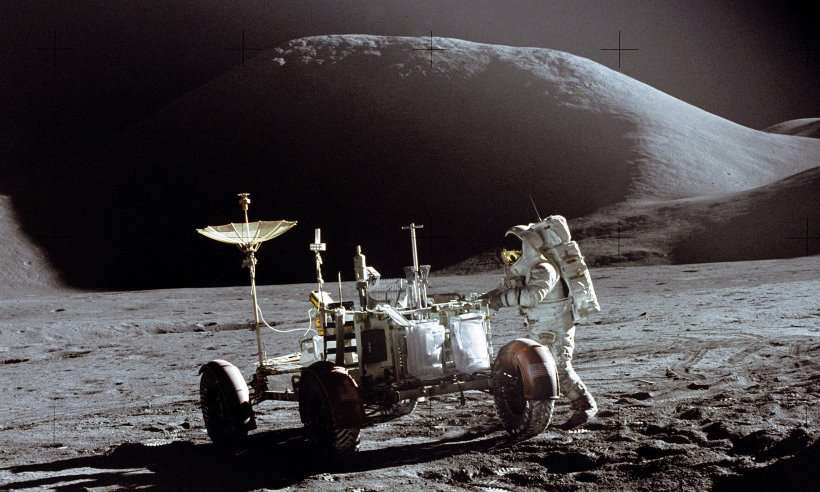
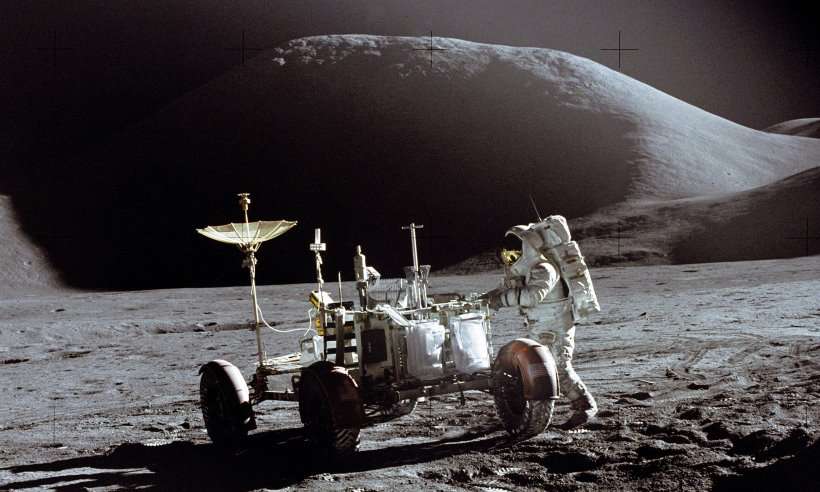
BUGUE Voltando à Lua, foi em 1971 que os americanos levaram seu primeiro veículo ao satélite natural que já haviam visitado três vezes. Foi a missão tripulada Apollo 15 que levou o primeiro “jipe” para rodar na Lua, mas essa história começou bem antes disso. Os primeiros projetos, da década de 1960, previam o uso de veículo grandes, com cabine pressurizada e tudo mais. Porém, para levar veículos desse porte, teriam que ser lançados dois foguetes espaciais. A necessidade de ficar dentro do orçamento deu espaço para projetos mais simples.
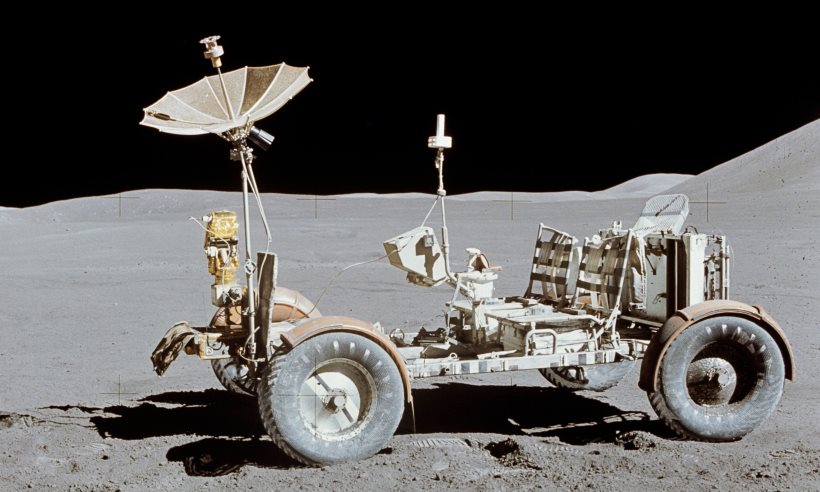
O Lunar Roving Vehicle (LRV) era uma espécie de bugue com 3,10 metros de comprimento e 2,30m de entre-eixos. O chassi de alumínio era o ponto de partida para um veículo leve – na Terra, o LRV tinha 210kg de massa, número que caia para 35kg na baixa gravidade da Lua –, mas também se entendia a todos os componentes, como os bancos, com estrutura tubular de alumínio e tiras de náilon nos assentos e encosto. Além de leve, para caber no “porta-malas” do módulo lunar, o veículo precisava ser compacto. Assim, o LRV foi dobrado para ser transportado. Ao menos a operação de montagem era simples.
Cada roda do LRV trazia um pequeno motor elétrico de 0,25cv, que entregavam a velocidade máxima de 13km/h. Porém, em detrimento da performance, o desafio era obter um veículo para operar com eficiência no vácuo e em ambiente de baixa gravidade. As suspensões traziam configuração tipo duplo A, com barras de torção superiores e inferiores. A altura mínima em relação ao solo era de 36 centímetros. As rodas em alumínio calçavam pneus especiais, com 81cm de diâmetro, feito em trama de fios de aço. A energia era fornecida por duas baterias não recarregáveis, que davam autonomia total de 92km. Os astronautas comandavam o veículo por meio de uma espécie de joystick posicionado entre os assentos, para que ambos pudessem controlá-lo.
Ao todo, foram fabricados quatro LRVs, além de alguns protótipos para testes e treinamento na Terra. Naturalmente, ao término das missões, os veículos (assim como vários outros objetos) eram deixados na Lua. Além do LRV da Apollo 15, outros dois foram usados nas missões seguintes (Apollo 16 e Apollo 17, ambas em 1972). O quarto veículo foi desmembrado em peças de reposição, já que a Apollo 18 foi cancelada. Na Lua, os trajetos eram feitos de modo que, caso o veículo falhasse, seria possível que os astronautas voltassem andando. No total, o LRV da Apollo 15 rodou 27,7km, enquanto o veículo da Apollo 16 percorreu 26,5km e o da Apollo 17 rodou por 35,9km.

ROBÔS Para explorar Marte, até o momento, os Estados Unidos optaram por usar veículos não tripulados. O primeiro contato que os americanos tiveram com o “Planeta Vermelho” foi em 1976, com as missões Viking 1 e Viking 2, que tinham a limitação de serem landers estacionários. Mas a coisa mudou de figura a partir de 1997, com a chegada do Sojourner. O robôzinho media 65cm de comprimento, 48cm de largura e 30cm e altura. A massa de 11,5kg na Terra correspondia a apenas 4,5kg em Marte. O veículo tinha seis rodas e um painel solar que fazia com que, a partir do momento que a bateria não recarregável se esgotasse, o veículo só funcionasse durante o dia. O Sojourner funcionou ao longo de 85 dias, tendo rodado apenas 100 metros, tendo até superado as expectativas. Além de fotos, a missão fez análises químicas do solo de Marte.
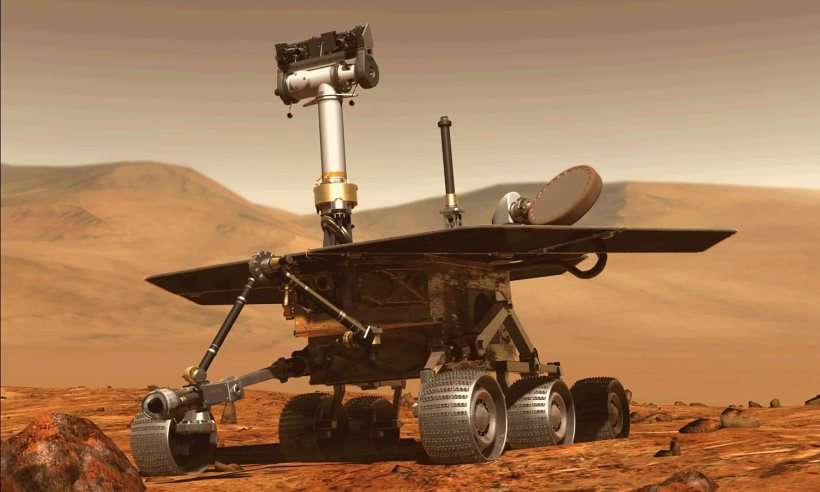
Em 2004 chegaram a Marte a dupla Spirit e Opportunity, uma em cada canto do planeta. Os robôs gêmeos tinham seis rodas, todas com pequenos motores elétricos movidos a energia solar. As baterias também armazenavam energia para o uso noturno. Os veículos mediam 1,6m de comprimento, 1,5m de altura e 2,3m de largura. A massa era de 180kg. Os projetos podiam operar em terrenos irregulares, com inclinações de até 30 graus. A velocidade máxima era de 5cm por segundo, mas a média era de 1cm/s.
Tendo chegando três semanas antes de seu irmão gêmeo, o Spirit acabou ficando preso em areia fofa em 2009. Os operadores ainda tentaram fazer manobras, mas não conseguiram tirá-lo dali. O veículo continuou operando como plataforma científica estacionária, até que perdeu contato em 2010. Ao todo, o Spirit rodou 7,7km, bem mais que os 600m planejados. O Opportunity teve vida mais longa, tendo perdido contato com a Terra só em 2018, após percorrer 45,1km. O robô enfrentou uma tempestade de poeira, que fez com que entrasse em hibernação. A partir daí não foi mais possível restabelecer contato com a Terra.
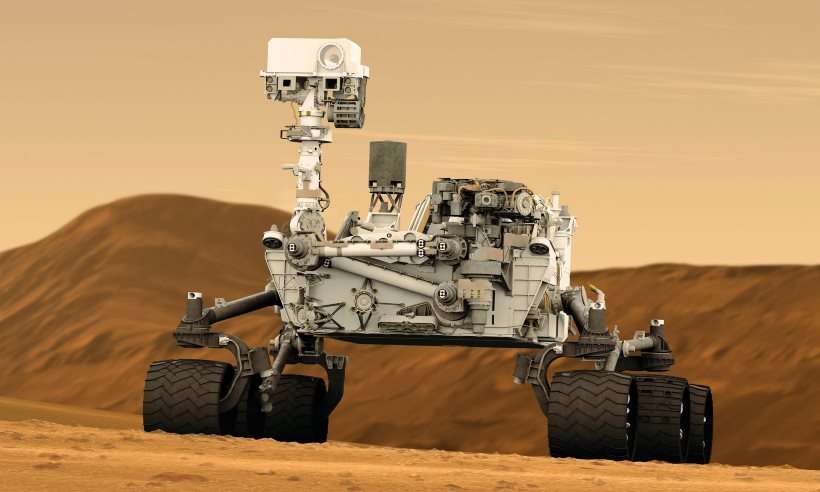
O quarto robô enviado a Marte foi o Curiosity, que chegou em 2012. Maior que os antecessores, o veículo mede 2,9m de comprimento, 2,7m de largura e 2,2 m de altura. Sua massa é de 899kg, incluindo 80kg de instrumentos científicos. As baterias são alimentadas por um gerador termoelétrico alimentado por dióxido de plutônio, que produz muito mais energia que os veículos anteriores. As seis rodas com 50cm de diâmetro pode ser movida de forma independente. A distância mínima do solo é de 60cm. O veículo é capaz de enfrentar declives de até 12,5 graus e inclinação de 50 graus. Até o momento, o Curiosity rodou mais de 20km.